近日,中国计量大学王斌锐教授领衔的智能机器人与计量检测研究团队在国际权威期刊《IEEE Transactions on Industrial Electronics》(中科院一区TOP)发表题为《Optimal Event-Triggered Neural LearningTracking Control for Pneumatic MuscleAntagonistic Joint with Asymmetric Constraints》的研究论文。该研究首次提出事件触发自适应动态规划(ETADP)方法,成功解决了存在外部干扰和不对称输入约束的复杂非线性系统鲁棒跟踪控制难题,并在真实气动肌肉仿生关节平台上实现验证,为仿生机器人高精度控制提供了新范式。
核心创新与技术突破
1. 首创事件触发积分强化学习(ETIRL)算法
针对传统控制方法需依赖完整系统模型、计算资源消耗大的缺陷,团队将事件触发机制与自适应动态规划(ADP)深度融合:
o 设计含干扰抑制水平的触发条件,仅当系统状态误差超过阈值时更新控制器;
o 利用单评价神经网络结构逼近最优控制律,较传统“执行-评价”双网络结构计算负担降低40%;
o 理论证明闭环系统渐近稳定性和神经网络权值一致最终有界性(UUB),彻底排除Zeno行为风险。
2. 攻克不对称输入约束与干扰协同难题
研究首次同时处理气动肌肉系统的非对称饱和输入(-70 ≤ *u* ≤ 85 kPa)和未知外部扰动(ω(ξ) = *p*₀*x*₁cos*x*₁),通过构造非二次价值函数和折扣衰减因子,将H∞鲁棒控制转化为零和博弈问题,实现干扰抑制与能耗优化的平衡。
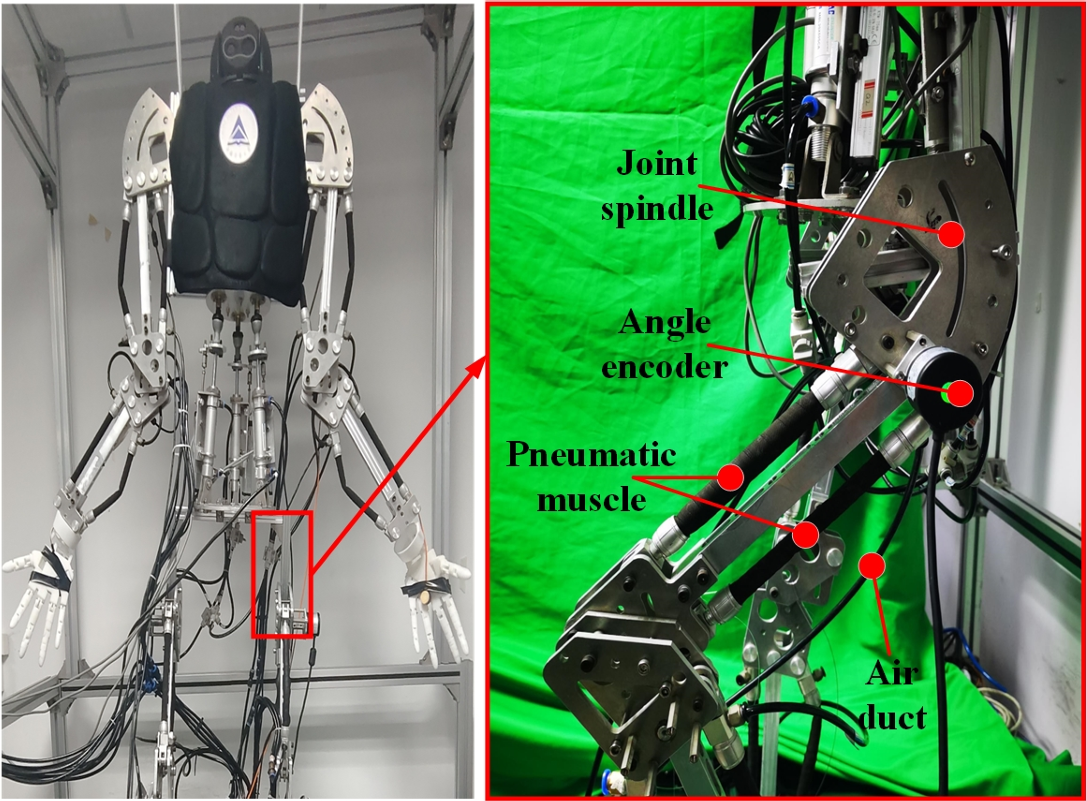
3. 全球首例仿生关节实体验证
在自主搭建的人形气动肌肉机器人实验平台(图1)上,团队验证了ETADP的优越性:
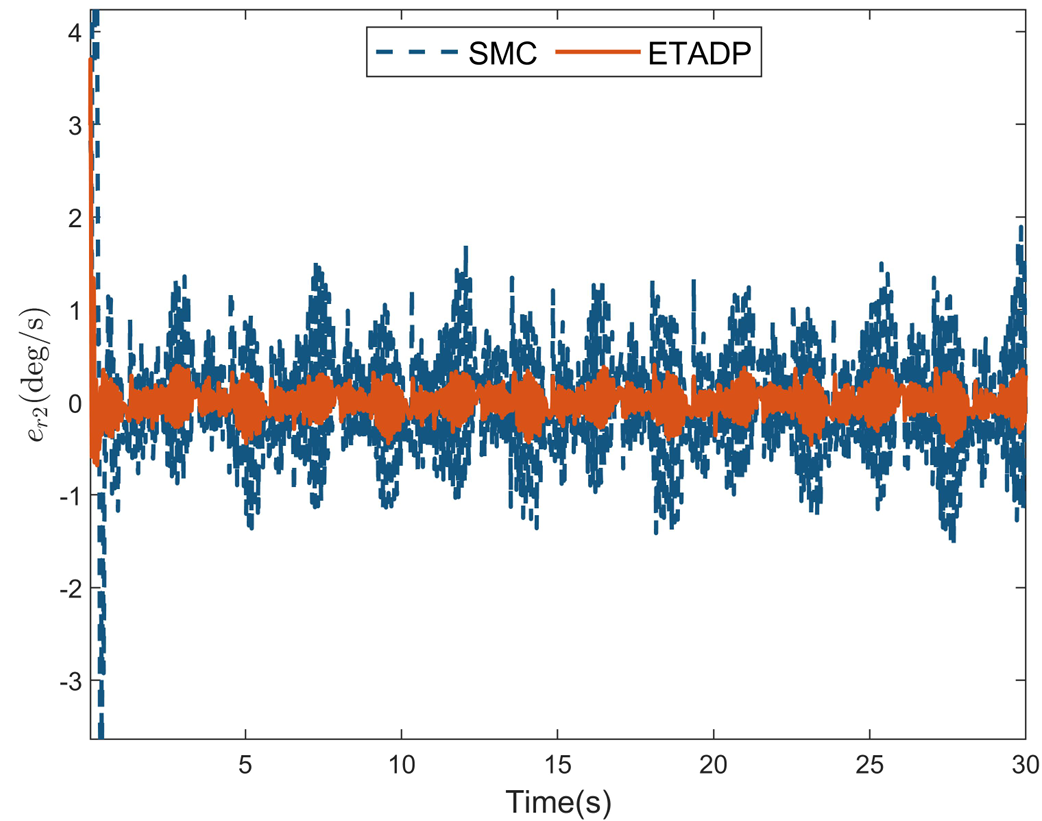
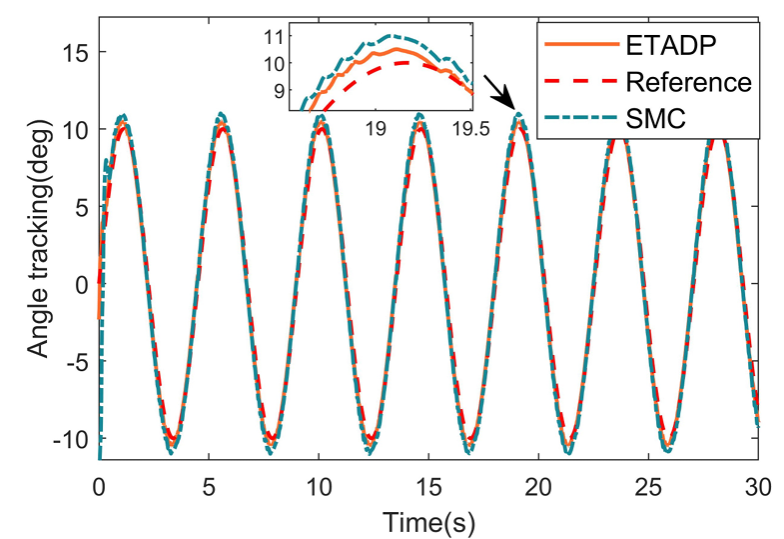
o 跟踪精度提升:角度跟踪最大误差仅0.53°(滑模控制SMC为1°),角速度误差降低至0.57°/s(SMC为1.4°/s);
o 资源消耗锐减:控制器更新次数较传统时间触发ADP减少76.5%,平均采样间隔从0.04秒增至0.17秒;
o 能耗优化显著:在相同跟踪精度下,控制输入能量消耗较SMC降低30%。
学术价值与应用前景
本研究首次将事件触发算法应用于真实仿生关节控制,突破了现有成果多局限于仿真验证的瓶颈。气动肌肉固有的迟滞、蠕变等非线性特性导致高频轨迹跟踪困难,ETADP为这类复杂系统的实时优化控制提供了普适性框架。该技术可拓展至康复机器人、柔性机械臂等领域,为高动态环境下的精密控制提供核心算法支撑。

